诸怀疆 | Huaijiang Zhu

I am a founding engineer at a stealth robotics startup, working on the science and engineering of data and evaluation for physical AI. Previously, I was a founding engineer at Alquist, where I worked on multimodal reasoning for embodied agents.
I received my Ph.D. from New York University, where I was advised by Prof. Ludovic Righetti at the Machines in Motion Laboratory. During my Ph.D., I interned at the Boston Dynamics RAI Institute, working with Dr. Tao Pang on contact-rich dexterous manipulation. Prior to NYU, I received my bachelor's and master's degree in Electrical Engineering from the Technical University of Munich.
selected publications
View all
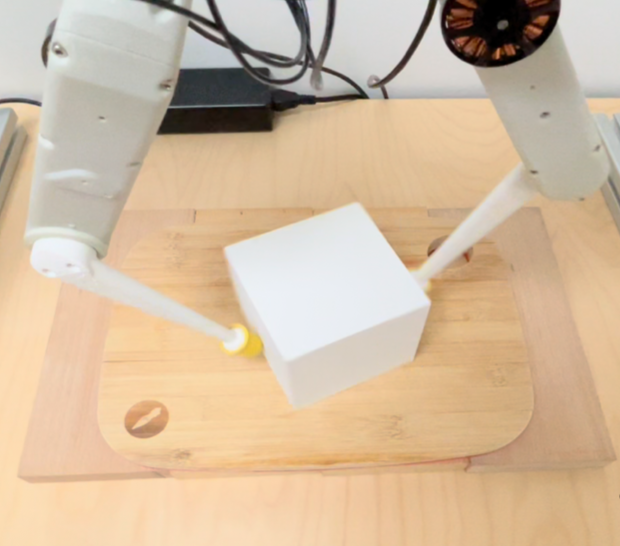
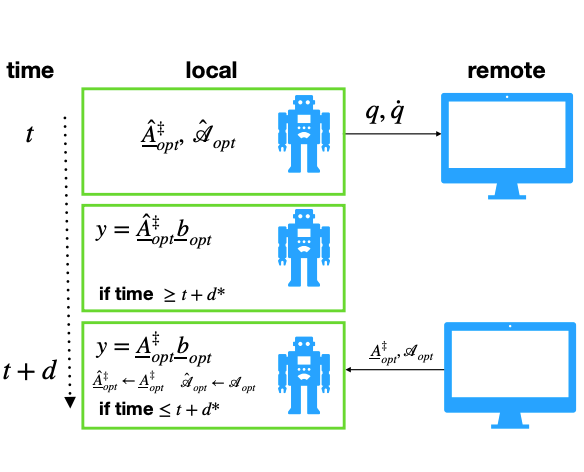
Enabling Remote Whole-Body Control with 5G Edge Computing
Huaijiang Zhu, Manali Sharma, Kai Pfeiffer, Marco Mezzavilla, Jia Shen, Sundeep Rangan, Ludovic Righetti
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020