Publications
2025

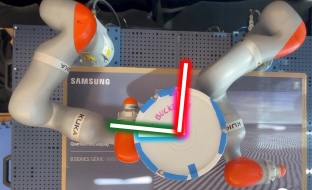
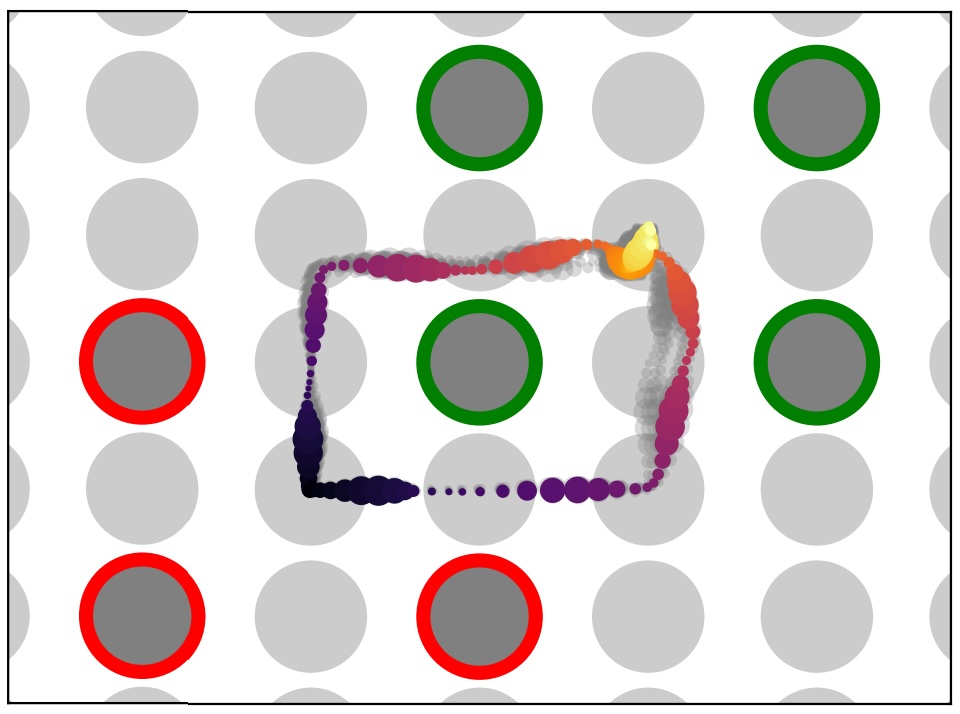
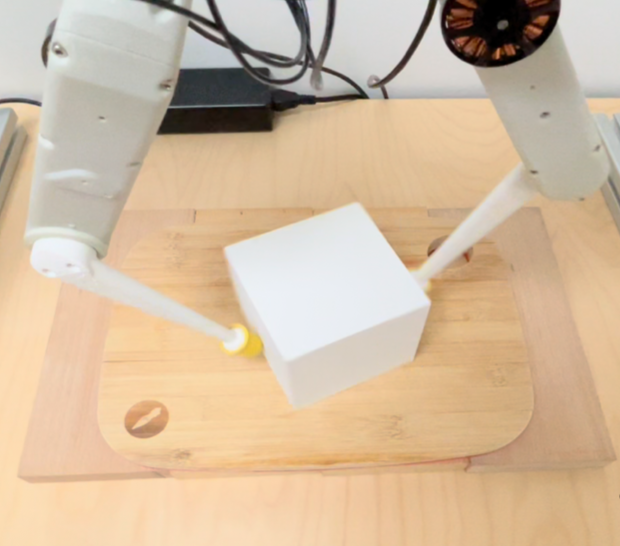
Is Linear Feedback on Smoothed Dynamics Sufficient for Stabilizing Contact-Rich Plans?
Yuki Shirai, Tong Zhao, HJ Suh, Huaijiang Zhu, Xinpei Ni, Jiuguang Wang, Max Simchowitz, Tao Pang
IEEE International Conference on Robotics and Automation (ICRA), 2025
2024
Diffusion-Based Learning of Contact Plans for Agile Locomotion
Victor Dhedin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2024
2023

Learning Locomotion Skills from MPC in Sensor Space
Majid Khadiv, Avadesh Meduri, Huaijiang Zhu, Ludovic Righetti, Bernhard Scholkopf
Learning for Dynamics & Control Conference (L4DC), 2023
MPC with Sensor-Based Online Cost Adaptation
Avadesh Meduri, Huaijiang Zhu, Armand Jordana, Ludovic Righetti
IEEE International Conference on Robotics and Automation (ICRA), 2023
2020
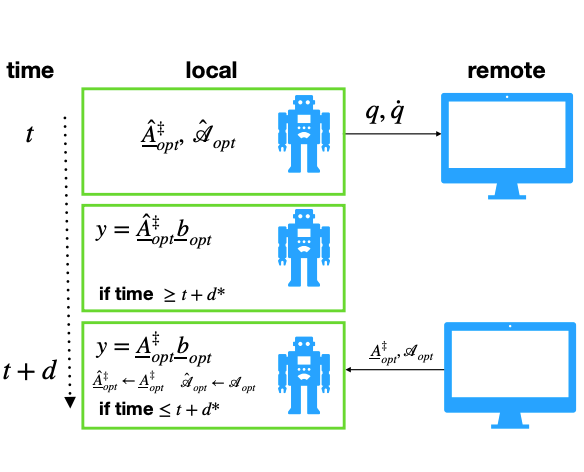
Enabling Remote Whole-Body Control with 5G Edge Computing
Huaijiang Zhu, Manali Sharma, Kai Pfeiffer, Marco Mezzavilla, Jia Shen, Sundeep Rangan, Ludovic Righetti
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
2017
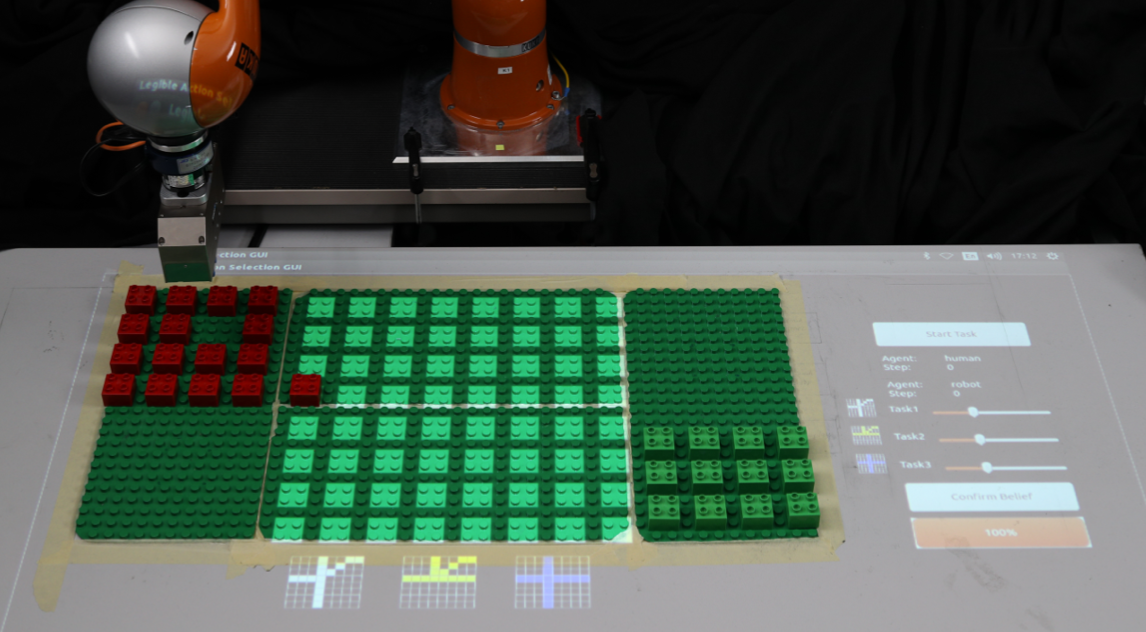
Legible Action Selection in Human-Robot Collaboration
Huaijiang Zhu, Volker Gabler, Dirk Wollherr
IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2017